Il PIC 16F84
Introduzione
Il
16F84 è un microcontrollore
RISC a 8 bit della Microchip estremamente versatile e semplice da
utilizzare. E' possibile controllare led, rele', motori
e attuatori in genere oppure controllare lo stato di sensori
esterni. E' molto utilizzato anche come manipolatore e
generatore/ricevitore di segnali (radiocomandi, lettore di schede
magnetiche e/o simcard etc...). Prima di poter utilizzare il PIC
occorre programmarlo; cio' richiede l'inserimento del programma
compilato anella memoria interna. Il programma invece viene realizzato
e compilato
con l'ausilio di un normale computer casalingo.
Una volta programmato ed acceso, il PIC inizia ad eseguire il programma e, se previsto, a
comunicare opportunamente con il mondo esterno tramite i suoi 13
piedini di ingresso/uscita. Il microcontrollore è
anche molto economico (un singolo pezzo può venire a costare
intorno ai 7 euro, mentre se presi in stock si arriva anche a 50
centesimi l'uno) il che lo rende adatto anche per l'elettronica
amatoriale.
In foto si mostra un PIC 16F84 nel classico package DIL a 18 piedini.
|
Caratteristiche
- Architettura
Harvard: il
PIC possiede memorie separate per i dati e le istruzioni.
- Memoria
FLASH per le
istruzioni da 1 K (1024 istruzioni) programmabile con l'ausilio di un
computer esterno. Questa memoria supporta fino ad un massimo di 1000
cicli di cancellazione/scrittura.
- Memoria
RAM dei dati da
90 bytes, dei quali 22 utilizzati per i registri interni di sistema
(SFR = Special Function Registers) e i restanti 68 come registri utente
liberi (GPR = General Purpose Register)
- Frequenza
di clock
massima: 10MHz (20MHz per la versione 16F84A)
- Un
set di appena 35
istruzioni. Grazie al sistema di pipelining ogni istruzione
viene eseguita in un singolo ciclo macchina (4 colpi di clock) eccetto
le istruzioni di salto che richiedono 2 cicli macchina (8 colpi di
clock). Ad esempio, con un oscillatore esterno da 4MHz è
richiesto 1 microsecondo per l'esecuzione di una istruzione non di
salto e 2 microsecondi per quelle di salto (condizionato o non).
- Memoria
EEPROM interna
da 64 bytes. Questa memoria può essere programmata via
software
dal PIC stesso e sopporta fino ad un massimo di 1 milione di cicli di
cancellazione/scrittura. Tale memoria non può essere
utilizzata
come RAM aggiuntiva per via della sua lentezza (20 ms in scrittura) e
l'accesso seriale (non e' mappata nello spazio degli indirizzi
direttamente raggiungibili dalla CPU e viene letta/scritta solo tramite
l'ausiliio di alcuni dei registri speciali SFR)
- Stack
a 8 livelli (Lo
stack è implementato in una memoria a parte non visibile da
programma e quindi non occupa lo spazio della RAM)
- 2
porte di I/O (porta A
a 5 bit e porta B a 8 bit) per un totale di 13 piedini di
ingresso/uscita. Ogni linea può essere programmata
indipendentemente dalle altre come linea di ingresso o linea di uscita.
Possono sembrare poche ma va sempre ricordato che il microcontrollore
è alloggiato in un DIL a soli 18 piedini!
- 4
diverse
possibilità di interrupt (esterno tramite piedino apposito, del timer, esterno dovuto al cambio di stato dei piedini
di I/O, interno di completamento della fase di scrittura della EEPROM)
- Opzione
di protezione
del codice. Settando questa opzione viene impedito ogni tentativo di lettura della
memoria FLASH d programma.
- Tensione
di
alimentazione da 2 a 6 volt. Tensione di programmazione da 12 a 14 volt.
|
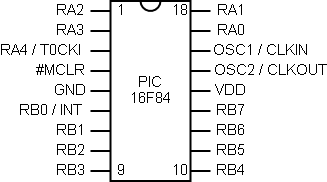
Piedinatura
Come
detto prima il PIC possiede 18
piedini. 13 di questi sono adibiti all'I/O in logica TTL: questo
significa che i valori booleani sono rappresentati dalle
tensioni 0V e +5V rispettivamente per lo 0 e 1 logico. I rimanenti
piedini vengono impiegati per il reset, l'alimentazione e per l'oscillatore
esterno che fornisce il clock al PIC stesso. Come si vede in figura
alcuni piedini hanno una duplice funzione (ad esempio il piedino numero
3 porta la dicitura RA4 e T0CKl) anche se di default vale la prima (il
piedino numero 3 e' di default RA4). Le funzioni secondarie verranno
spiegate piu' avanti.
|
Ecco
l'elenco dei piedini e delle loro
funzioni:
- RA0, RA1, RA2, RA3, RA4
- Sono i 5 piedini
della porta A
(tale porta e' a 5 bit). I piedini possono essere configurati
indipendentemente come linee di ingresso o di uscita. Quando
un
piedino e' impostato come linea di uscita, presentera' una tensione di
0V o 5V a seconda che il PIC abbia associato uno 0 o 1 logico al piedino
stesso, tramite apposite istruzioni. Quando e' impostato come ingresso,
il PIC potra' ricevere un valore booleano leggendo il livello di
tensione fornito al piedino in questione. Se il livello e' maggiore di
2V verra' letto un 1 logico, se inferiore a 0.8V verra' letto lo 0
logico. Applicando una tensione compresa tra 0.8 e 2V il risultato e' impredicibile.
- RB0, RB1, RB2, RB3, RB4,
RB5, RB6, RB7 -
Sono gli 8 piedini
della porta B. Valgono le considerazioni viste per quelli della porta A.
- GND - Riferimento di
massa
- VDD - Tensione di
alimentazione. Deve
essere compresa tra 2
e 6V. Di norma e' 5V.
- OSC1 e OSC2 - A questi
piedini deve essere
collegato
l'oscillatore che fornisce il clock al sistema. Per alcuni tipi di
oscillatori sono necessari tutti e due i piedini, per altri serve solo
OSC1 e quindi OSC2 puo' essere lasciato scollegato.
- #MCLR -
Piedino di reset, detto anche MasterCLeaR.
L'attivazione del piedino produce un reset del PIC, cioe' il sistema
riparte da capo con l'esecuzione del programma interno, come quando
viene appena acceso. Questo piedino e' l'unico ad essere attivo basso,
cio' significa che solo portandolo a massa si provoca il reset del
PIC; durante il funzionamento normale il piedino deve essere mantenuto
a livello logico alto tramite apposita resistenza limitatrice di corrente.
|
Il
piedino #MCLR
Per
funzionare correttamente il PIC ha
bisogno di tenere alto il livello logico del piedino di reset (#MCLR).
Ogni
volta che si desidera resettare il PIC occorrera' invece portare a
massa tale piedino.
Ecco un semplice circuito di pull-up standard da interfacciare al
piedino #MCLR del microcontrollore: solo due resistenze ed un
interruttore.
|
Durante
il funzionamento normale, cioe'
ad interruttore aperto, il piedino #MCLR e' in stato logico alto (circa
VDD Volt). Premendo l'interruttore si porta momentaneamente a massa il
piedino, scatenando il reset del PIC. La resistenza da 100 ohm limita
la corrente nel piedino stesso quando il pulsante e' premuto.
Come si vedra' anche negli esempi questo circuito e' praticamente
sempre presente.
|
Oscillatore
esterno
L'oscillatore
esterno fornisce il clock
al microcontrollore, permettendone cosi' il corretto funzionamento. Il
PIC 16F84 accetta clock con frequenza fino a 10MHz (il
modello 16F84A fino a 20MHz). In ogni caso il PIC impiega 4 colpi di
clock per istruzione (8 nel caso di istruzioni di salto).
Esistono 4 tipi di oscillatori: XT,RC,LS e HS
Utilizza un cristallo di
quarzo da
collegare ad entrambi i piedini OSC1/CLKIN e OSC2. Le frequenze
supportate dipendono dal quarzo stesso nel range di valori da 100KHz e
20MHz. Questo tipo di oscillatore e' estremamente preciso ed affidabile
e quindi quello piu' utilizzato.
E'
un'oscillatore molto
semplice,
composto da una restistenza ed un condensatore, da collegare al piedino
OSC1/CLKIN. Il piedino OSC2 puo' essere lasciato scollegato,
oppure puo' essere utilizzato per prelevare un segnale ad onda quadra
di frequenza pari alla quarta
parte di quella di clock, cioe' la frequenza di esecuzione delle
istruzioni (una istruzione richiede 4 colpi di clock). Il consumo di
corrente e' ridotto al minimo ma l'oscillatore e' poco preciso e tende
a variare la frequenza in funzione della temperatura e tensione di
alimentazione. Si raggiungono basse frequenze (da 80Hz fino a 625KHz):
ad esempio, con una resistenza da 10K e un condensatore da 220pF si
raggiungono gli 80KHz.
Per programmi che richiedono una esecuzione lenta conviene installare
un oscillatore XT e poi aggiungere istruzioni di ritardo, piuttosto che
abbassare la frequenza del PIC con un oscillatore RC.
Utilizzano
un risonatore ceramico
rispettivamente per basse ed alte frequenze di clock. Tutti e due i
tipi sono abbastanza precisi, il primo tende a consumare poco mentre il
secondo molto di piu', per via delle elevate frequenze raggiunte.
Durante
la fase di
programmazione del PIC andra' specificato quale dei 4 tipi di
oscillatore e' stato utilizzato. In questo modo i piedini 15 e 16 del
PIC (OSC1/CLKIN e OSC2/CLKOUT) si configureranno in modo opportuno per
ricevere il segnale da quello specifico tipo di oscillatore.
|
Struttura
interna
In
figura viene riportata a grandi linee
la struttura interna del PIC. In alto a sinistra e' la memoria delle
istruzioni da 1024 posizioni. In alto al centro la RAM principale,
chiamata anche RAM File Register da 68 byte (cioe' 68 registri). A
destra di questa e' la memoria EEPROM da 64 byte.
La memoria delle istruzioni viene indirizzata da uno specifico
puntatore detto Program Counter. Tale registro permette di recuperare
in sequenza le istruzioni del programma e di portarle nell'Instruction
register. Sebbene bastino 10 bit per indirizzare la memoria istruzioni
(2^10 = 1024) il Program Counter e' a 13 bit perche' il modello 16F84
(come il 16F84A) fa parte di una famiglia di PIC piu' estesa che
contempla anche memorie di dimensioni maggiori: i progettisti tendono a
ridurre le differenze tra le varie versioni dei PIC per minimizzare i
costi di produzione. L'istruzione viene poi inserita nell'Instruction
register (di 14 bit) e poi decodificata ed eseguita. Il Program Counter
viene incrementato di uno (oppure di una altra quantita' se e' previsto
un salto).
Il microcontrollore possiede un solo registro esterno alla memoria RAM, il registro W (Work). Questo registro entra in gioco
durante le operazioni booleane, aritmetiche o di movimentazione dei
dati. Ad esempio, per copiare un byte da una posizione di memoria ad un
altra occorrono due istruzioni macchina: la prima legge la posizione di
memoria desiderata e ne trasferisce il contenuto (il byte) nel registro
W, la seconda trasferisce il contenuto di W nella posizione di memoria
di destinazione.
Le operazioni booleane o aritmetiche prevedono sempre e solo due
operandi, il primo e' W, il secondo e' un locazione di memoria RAM
(cioe' un registro del File Register); si puo' scegliere se piazzare il
risultato dell'operazione in W (e quindi sovrascrivere il primo
operando), o nella stessa locazione di memoria (sovrascrivendo il
secondo operando).
Le porte di I/O (porta A e porta B) sono mappate in RAM, cio' significa
che si puo' leggere e scrivere nelle porte semplicemente leggendo e
scrivendo nelle relative locazioni in RAM. Ad esempio, una scrittura di
un byte nella locazione di memoria collegata alla porta B causa la
configurazione opportuna dei segnali di tensione nei piedini della porta B
(RB0,RB1,RB2 ... RB7), viceversa una lettura traduce in un byte la
configurazione attuale delle tensioni applicate sui piedini di tale
porta. Ovviamente un piedino di I/O non puo' essere simultaneamente di
input e di putput: occorre decidere all'inizio la "direzione" dei
piedini per tutte e 13 le linee e cio' si risolve ancora una volta
scrivendo in determinate posizioni di memoria RAM.
Piu' avanti si chiariranno tutti questi meccanismi con esempi in
assembler.
|
|